Les articles > 14e Coupe de robotique ITER
Dans le cadre de sa formation au FacLab au Diplôme Universitaire Fabmanager, Techniques de fabrication numérique et de facilitation, Jean-Pierre nous propose un article sur la robotique à destination des publics jeunes.
J’ai été sollicité au début du mois de mai par mes amis Manon et Sébastien, membres du LAB d’Aix en Provence comme moi, pour participer à une animation en partenariat avec le Consortium ITER, cette animation étant elle-même intégrée au projet SteamCity dont le LAB est partenaire.

Cette animation s’est déroulée le 22 mai 2025 au sein de l’école d’ingénieur Polytech de Château Gombert près de Marseille, pendant la 14 ème édition de la Coupe de Robotique ITER, réunissant cette année près de 600 personnes.
Cette événement organisé par le consortium ITER propose à des scolaires, dont le niveau s’échelonne du CM2 à la classe de Terminale, à se challenger lors d’épreuves de robotique pensées par les organisateurs et ayant pour cadre le projet ITER.
Ces défis que relèvent les enseignants et leurs élèves, sont variés :
- Concevoir et programmer un robot capable de transporter un composant sur un trajet prédéfini,
- S’adapter aux changements de dernière minute,
- Elaborer un dossier technique,
- Présenter une épreuve de culture générale qui passe en revue l’histoire, la géographie et la culture des pays membres d’ITER.
Les épreuves de robotique sont de difficultés croissantes en fonction du niveau des élèves, exception faite des classes de CM2 qui ont une épreuve de suivi ligne avec le robot THYMIO imposé.
On peut donc suivre des épreuves de :
- WAYS : mobilité et vitesse
- TRANSPORT : performances de suivi de ligne et de transport (tirer-pousser pour les robots Thymio).
- PICK AND PLACE : opérations de prise et de dépose de pièces d’un point A vers un point B.
- CO-OPERATE : combinaison des épreuves Transport et Pick and Place.
- DESSIN pour les classes de CM2 uniquement.
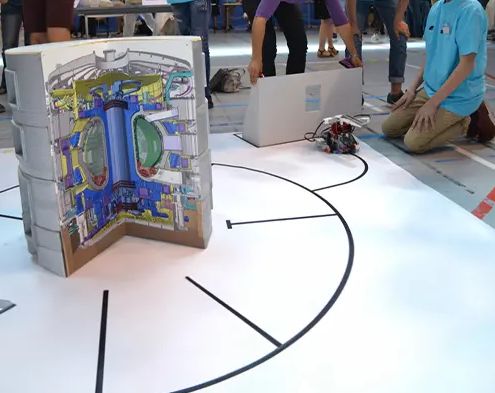


Mais cette magnifique journée printanière et cette ambiance bon enfant ne devaient pas nous faire oublier la raison de notre présence à cet événement.
L’animation proposée par le LAB dans le cadre du projet SteamCity, devait permettre au consortium d’observer comment les étudiants intéragissent avec l’apprentissage par investigation et comment ils réagissent à des scénarios de résolution de problèmes concrets.
Ce protocole d’apprentissage bio-inspiré a été adapté en un format pratique et autonome, utilisant une grille 6×6, un robot de style rétro, des jetons de récompense ( dans ce dernier cas, nous avions choisi des bonbons afin “d’attirer” le public que nous devions convaincre. Je sais cela n’est pas très fair-play) et un système de feedback (comprenant une fiche mémoire pour les élèves et des informations contextuelles à transmettre oralement pour ouvrir les discussions sur l’objectif de l’activité).
Un travail réalisé en amont, en étroite collaboration avec les organisateurs du concours de robots ITER, a permis une intégration de cette activité au programme de l’événement, garantissant ainsi une rotation fluide des groupes d’étudiants et un espace suffisant pour l’activité.
Nous avons préparé la veille tout le matériel nécessaire au sein des locaux du LAB. J’ai aussi été briefé afin d’assurer la cohérence de l’animation. L’accent a été mis sur le développement de la pensée critique et l’intégration de l’activité au contexte plus large de l’IA. Le jour J un stand fonctionnel et accueillant dédié au L.A.B. a été créé dans l’espace événementiel. Il comprenait les tapis d’apprentissage, le matériel, les supports visuels et un espace suffisant pour faciliter le travail de groupe et les discussions. Une signalétique claire et la présence d’un animateur ont permis de garantir l’accessibilité et la fluidité de l’activité pour les participants.
Nous avons proposé cette activité de 9h00 à 14h00. Celle-ci était intégrée au programme de la compétition et les élèves ont pu y participer en groupes tournants de 3 à 6 élèves pendant les pauses du programme principal de la compétition.
Chaque groupe d’élèves ont suivi un protocole consistant à une exploration libre de la grille en partant d’un point A connu pour atteindre un point B inconnu, leurs déplacements dans l’espace se faisant par essais et erreurs. Ils découvraient au fur et à mesure l’emplacement des obstacles et des récompenses, sans connaissance préalable de la disposition de la grille. En tant qu’animateur, je ne fournissait que les modalités de déplacement sur la grille, l’objectif de la tâche mais aucunes instructions sur la marche à suivre, afin d’encourager la découverte autonome.

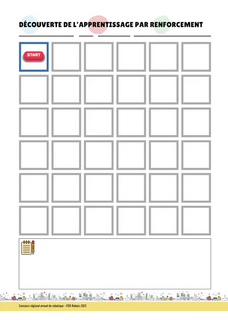
Ci-dessus, à gauche la fiche animateur avec la case départ soulignée en bleu et la case arrivée soulignée en vert et à droite la fiche fournie aux élèves comportant juste la case départ.
Tandis que les élèves progressent pas à pas sur la grille 6×6, les animateurs donnent un feedback après chaque déplacement : une récompense (un bonbon) pour avoir atteint une case sûre, ou une réinitialisation (perdre tous les bonbons et recommencer depuis le début) lorsqu’un obstacle est rencontré. Ce mécanisme stimule le processus d’apprentissage par essais-erreurs et la nécessité d’adapter les stratégies en fonction des retours, créant ainsi un environnement d’apprentissage stimulant et ludique.
Une fiche mémo était à la disposition des élèves, favorisant ainsi diverses stratégies.(enregistrement de leurs mouvements, notation de l’emplacement des obstacles, etc …). Cet élément favorisait les approches individuelles ou collaboratives de résolution de problèmes, conformément aux principes d’apprentissage par investigation.
Après la séance de jeu, nous avons mis en place une phase de compte-rendu afin d’encourager les élèves à réfléchir aux stratégies utilisées, à l’importance des retours et à l’évolution de leur compréhension au fil du jeu. C’est à cette étape que nous introduisions le parallèle avec l’apprentissage bio-inspiré et l’IA, expliquant comment les humains et les machines apprennent en adaptant leur comportement grâce à des retours itératifs. Et pour que les élèves puissent faire le lien avec des défis concrets, tels que la robotique, la prise de décision par IA et la résolution de problèmes dans des environnements complexes.
Au final, cette activité a mobilisé avec succès 292 étudiants, offrant ainsi une expérience d’apprentissage pratique, basée sur l’enquête et reliant le gameplay à la réflexion critique sur l’IA et ses applications.
Ces deux jours ont été pour moi une expérience extrêment enrichissante, avec l’élaboration des supports, la prise en main et la mise en place de cette activité. Travailler avec un jeune public s’avère toujours un défi pour moi. Même si pour beaucoup d’entre nous, futur fabmanager, cette tâche peut sembler effrayante, elle n’en est pas moins la plus formatrice.
Pour conclure, j’ai passé une excellente journée. La passion pour la robotique, cet esprit d’entreprise et d’invention, plus que la compétition, me fait penser que nos fablabs ont de beaux jours devant eux, si nous arrivons bien sûr à attirer ce public autrement qu’avec des bonbons.
J’aimerais remercier mes amis Manon et Sébastien d’avoir pensés à moi pour les aider dans cette entreprise. Tous mes remerciements aux équipes du consortium ITER et de l’école d’ingénieur PolyTech de Château Gombert pour leur accueil et leur gentillesse et tout pour m’avoir permis de rencontrer un héros de Blockbuster.

Jean-Pierre MARTIN,
apprenant du Diplôme Universitaire Fabmanager, technique de facilitation et de fabrication numérique, promo #16